Francis McCabe
Gyroscopic Inertial Propulsion
Gyroscopic Inertial Propulsion
https://www.chestnuthilllocal.com/stories/francis-j-mccabe-inventor-and-business-owner,4803
Francis J. McCabe, inventor and business owner
Francis Joseph McCabe, 77, of Mt. Airy, an inventor and owner of businesses in Bucks County, died of a heart attack March 15 at Chestnut Hill Hospital.
Mr. McCabe, who was the holder of more than 100 patents, founded Prefco Products, a fire and smoke damper manufacturer, in 1968 in Buckingham. From the air and wind technology created during his time at Prefco, he perfected the world's fastest and lowest wind-responding wind-turbine airfoil.
He also founded the Lev/Air firm in Doylestown, where he created the most powerful max-torque windmill airfoil system. At Lev/Air he also developed the first car to run solely on compressed air, powered by a low RPM, high-torque windmill.
Mr. McCabe, who held a NASA certification, had worked for and with Boeing and NASA engineers on a variety of projects.
In later life, he became interested in gyroscopic physics and conducted a 30-year string of experiments in gyroscopic motion in a Bucks County barn. In an interview with the Chestnut Hill Local in 2013, he said he believed that the spiral energy he called “gyroscopic procession” had the potential to become the world's most powerful generator of energy and power.
Mr. McCabe taught gyroscopic science to young people at the Institutes for the Achievement of Human Potential in Wyndmoor and at The Quaker School at Horsham....
https://www.youtube.com/watch?v=TauNcWlhA58
The Secret Life of Gyroscopes (2012)
[ MP4 ]
Most technically savvy people know that the primary behavior of rapidly spinning gyroscopes is to strongly resist any change in the angular orientation of their spin-axes. However, rapidly spinning gyroscopes are perfectly happy and well-behaved with any movement along that axis, or relocation of that axis which remains exactly parallel to its original orientation during such movement or at its new location. Most of those technically savvy people above have had the opportunity to play with a toy gyroscope and have forced the gyroscope’s spin-axis to accept an angular change and have thus, directly experienced a phenomenon called “precession,” which resists that applied force with a force of its own and of proportional intensity. Gyroscopes are used primarily in guidance instruments and/or controls in moving vehicles, for example, gyroscopic compasses. In a much more limited range of application, and at a much larger physical size, they also serve as dampers to counter such unwanted oscillations as “roll” of a ship. Ever since the end of WWII and the entrance of the V2 rocket, and then spacecraft, not only has their sophistication and accuracy increased exponentially, but entirely new, equivalent technologies have entered the field, primarily in lock-step with that of other oscillation-based electronic equipment; e.g. Royal Rife’s electronically controlled microscope system. The speaker has devoted a sizable part of his discretionary lifetime conceiving, building, and experimenting with unique gyroscopic systems, that are quite robust, and in some cases, quite powerful. He now views, as indigenous, the relationship between the behavior of flywheel-type gyroscopes and most other physical phenomena. As he sees it, forced deviation from the natural precessional behavior of flywheel-type gyroscopic systems is identical to the motion fundamentals imbedded in other natural, physical phenomena, i.e. electron spin motion in atoms, DNA spirals, weather, cosmological phenomena, and oscillating motion in numerous other examples in physics. These arc-motion fundamentals exist in the mechanical distillations derived from over 25 physical experiments including: pulsed anti-gravity; spiral motion; motoring by both natural and powered precession; motion reversals; pendulum-tuned motoring; extremely rapid linear motion; a visual-mechanical demonstration of inertia; etc. The four basic, matter-building-block motions are: orbits, translations of orbits, rotation of the spin-plane, and powered, precession-formed spirals. Interactions caused by collisions with resulting re-encryptions of motion codifications such as electrical transmission; atomic fission and Royal Rife’s alternating DNA corrections via oscillation control could really be gyro physics. (The speaker had also intuited that DNA is a gyroscopically induced encoded-double-helix that can be re-encoded by tuned, oscillating-motion intervention.) Our questions to all are: can gyro momentum be conserved around abrupt 90-degree corners; can gyro wheel spin ‘storage’ be depleted without losing RPM, and can a self-selected 800:1 torque output be maintained indefinitely with only 1/800 continuous power input (1200 in-lbf natural precession maintained by less than 2 in-lbf DC motor input)? Recorded at the 31st annual SSE Conference in 2012 at the Millennium Hotel in Boulder, Colorado, USA.
https://www.youtube.com/watch?v=KjrVfsDNX2c
Oscillating Crank
[ MP4 ]
Two 6", 1.5 lb gyro wheels, air motor driven with air motor powered precession mounted on a crank arm. During 1/2 of the precessional rotation the major arm moves down, and up during the second 180 degrees (between two gyro neutral, parallel positions).
The output cranking torque is many multiples of the DC motor's rated torque.
https://www.youtube.com/watch?v=hsZgypWKGjE
Mechanical Demonstration of Inertia by Francis McCabe
[ MP4 ]
A video by the late Francis McCabe demonstrating that a group of randomly orientated gyroscopes will automatically align themselves in the direction of an applied torque. McCabe constructed a machine with 4 gyro horizons from World War 2 (WW2) planes fixed to an assembly that is free to rotate manually via a crank. A gyro horizon is an instrument used to measure an aircraft's orientation relative to the Earth's horizon. When McCabe starts the machine, the gyroscopes are spun up with air pressure and start oscillating and/or rotating (which McCabe describes as "motorization"). He notes that their is a self-developed frequency of oscillation and motorization. Then he applies an external torque by rotating the crank and immediately all the gyroscope line up! He notes that the force is felt only initially as the gyros are lining up and then the machines starts "coasting". This machine demonstrates what may well be the first mechanical rendition of inertia, which is a mass' resistance to change or acceleration. The gyros can be considered as tiny atoms, and the inertia that an object possesses is related to how many atoms need to reorient themselves in the direction of applied motion. Interestingly, this gyro assembly is also a good illustration of magnetism, since an externally applied magnetic field causes many tiny magnets to reorient themselves in the applied magnetic field direction. Are atoms and magnets just tiny gyroscopes? gyroscopes of the Aether? I think so! Francis McCabe was an inventor and rocket scientist that had stumbled upon the work of the late great Eric Laithwaite regarding gyroscopes...
https://www.youtube.com/watch?v=vP4emXJ_GS0
A 4-Spoke Motorization + Mechanical Inertia Demo
[ MP4 ]
A 4 spokes assembly that can rotate and traverse in its axial direction; in a cradle with air driven single gimbal 'gyro horizons' on the outer end of each spoke.
Manual turning the crank aligns the gyros to the gyro neutral equinox's. A resistance is induced during the alignments....possibly thee mechanical demonstration of inertia?
Another piece of physics is that the assembly sets up a self induced frequency that results in selected sequencing of motorizations of the gyro horizons.
https://www.youtube.com/watch?v=6q0qXRetpB4
Large Gyro Wheel Precesses at 1000X Torque Over-Unity // Math Easy Solutions
[ MP4 ]
Francis J. McCabe’s amazing Gyro Wheel Torque “Over-Unity” demonstration, which he had up on his YouTube Channel in June 27, 2012. Francis showed that a large 50 pound, 32 inch diameter gyro, precessing from about 25 inches from the pivot point, can still be “torqued-up” by a very small and visibly weak 6 volt battery with a “Torque Rating” of 2.5 inch-pounds at 12 volts.
Crunching in the numbers, we get roughly:
Output Torque = 50 pounds * 25 inches = 50 * 25 = 1,250 inch-pounds
Input Torque = 2.5 inch-pounds * (6 volts input) / (12 volts rating) = 1.25 inch-pounds.
Output Torque / Input Torque = 1250/1.25 = 1000 TIMES OVER-UNITY!
https://www.youtube.com/watch?v=rtuNh4Aa_XU
7 lb Wheel 'Gyro Lift' Demo
[ MP4 ]
A 1/2 HP air motor driven wheel; and an air gear motor for powered precession turning of a 4' verticle spiral-- pivoting arm. The gyro assembly is centrally mounted on the 4' arm. This confuses natural and powered precession, but an upward(?anti gravity) spiral can only be caused by powered precession.
Disconnecting the chain (powered) precession drive then permits only natural precession.
When the sliding weight ( on the 4' arm) is moved in towards the center( not shown on the video) the 4' arm slows. This seems against conservation of energy physics.
https://www.youtube.com/watch?v=0ubKR7_yS68
Gyro auto reversal geometries
[ MP4 ]
1.5 lb. wheel rigged to demonstrate precession reversal.
https://www.youtube.com/shorts/P3F-lFAIknY
Gyro Over Unity Dynamo
[ MP4 ]
https://www.youtube.com/shorts/aZeA5PaAz2k
Gyro Drive
[ MP4 ]
https://www.sciencedirect.com/science/article/pii/S1875389212025114/pdf
https://pdf.sciencedirectassets.com/277348/1-s2.0-S1875389212X00191/1-s2.0-S1875389212025114/main.pdf...
DOI:10.1016/j.phpro.2012.08.023
Physics Procedia 38 ( 2012 ) 198 – 221
This paper describes over 20 demonstration motion force specimens. These would be systems for traveling gyro-dynamic, torque-based generating force motion that apparently replicates the atomic mechanics of the electron energy torus; and other mass transfer phenomenon which also demonstrate a possible mechanical motion explanation for inertia. First, the paper will discuss the problems in discovery of how ÈinertiaŠ (and gravity) may have its basis in the inherent immediate reaction from gyro "wave" (atomic / molecular) planar disturbances -- (any multiples of angular rotation of the mass spin plane). This generated torque force field could be a summation / synthesis of gyroscopic reactions. These reactions appear to be based on the plane of stability (or force) associated with a mass arc travel. Axial rotation of the plane of rotation sets up a torque system linked to precession. ÈNaturalŠ precession always starts with an orbital "bumping" which manifests as a cyclic settlement into handling torsion loadings on the original (angular displacement) beam. The ÈbumpingŠhas been observed in gyroscopic initial precession reaction; and has been seen as an obstruction to the smooth major arc displacement energy transfer into precessional motion / torque. Appropriately powered precession is necessary for vortex energy and propulsion; and can obscure the "bumping".
During the time that the origin torque is passing through the (up to ½ turn) pre-alignment period, there is an opposition to acceleration of the system (mass) that is a definitively ratioed correlation displayed by the devices arc rates. This and the "bump" (which actually may be a cyclic basis for a continuous power / motion) can be the re-incryption of the DNA spiral and can also be sub-atomic in its application bases.
When many gyro particles are in a structure and, of course, at random positions, the sum of the precessional motion becomes ÈinertiaŠ. When the period is powered at a rate faster than the natural gyro resistance (e.g. to a gravity handling stability) relativity then various torque based power and spiral motion becomes available. The various resulting power systems include oscillating or waving propulsion -- needing dynamic dampening means. All these powerings have a time-mass motion translations / progression, propulsion and power usages.
https://www.researchgate.net/figure/Description-4-spokes-with-single-gimbal-gyros-on-the-outer-end-o-SatellitesN-of-each_fig1_271000059
Fig. 1 Description: 4 spokes with single-gimbal gyros on the outer end (õ SatellitesÑ ) of each spoke µ manual turn of assembly. Spokes are adjustable and pivotable; gyros can be held in various positions. (Free to translate on major axis; gyros mounted with gimbal axes 30° to spoke radii.) 2. Purpose: an attempt to obtain linear action from rotation of the assembly. 3. Actions: a. Uninduced but stable incessant rotation of one gyro, whose axis is nearly parallel in an easterly direction (a õ moonÑ if you will), and which seems to be caused by inertial (or alignment energy) frequency of the other 3 gyros self-induced disharmonious oscillation; this disharmony is not perfectly stable (irregular), and may be due to the possibility that they gyros are RPM mismatched; b. Also observable is a minuscule rotation/counter-rotation of the whole assembly; c. The range of oscillation of the opposite gyro appears to be õ correctiveÑ to maintain the full rotation of the opposing gyros power input changes. d. We can manipulate the frequency and a much more rapid motorization of some/one/all of the gyros can be induced. e. The above contains noticeable resistance while the system is initially accelerated µ also the precessional õ bumpingÑ that is an immediate response to any gyro rotation plane change appears to join in a power frequency oscillation that is transmitted to the other gyros in the system. f. There is no linear motion of the assembly which was the original intent.

Fig. 2
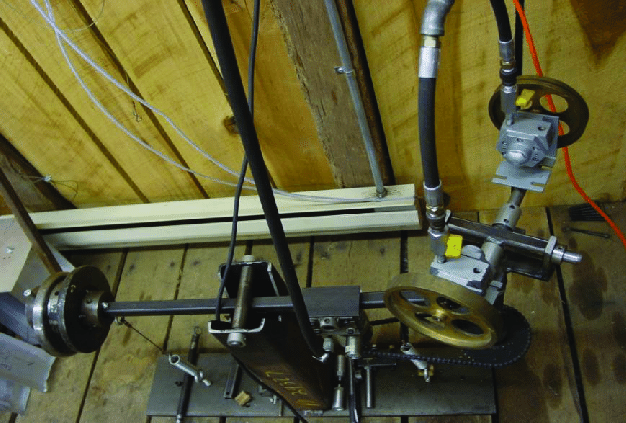
Fig. 3

Fig. 4
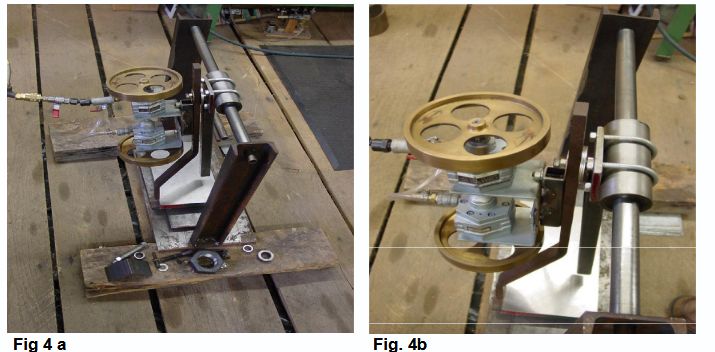
Fig. 4
Fig. 5
Notes: a. The
inertial resistance imposed in õ IÑ and õ JÑ was done
manually and took considerable action of the arm. b.
During the experiment, the wheel ripped itself loose from
the six ¼" diameter well impregnated welds.
A Report On A Gyroscope Workshop Set Up To Survey Mechanical Gyro Properties Of Forces, Torques, Motions; And Inertia Mechanics
Francis J. McCabe
[ PDF ]
Gyroscope Precession And Arc Mass Motion -- Why An Angularly Displaced Spinning Wheel Translates 90° (free) Or Helicly (forced)